# User Manual
| User Manual | Version | Compiled by | Date |
|---|---|---|---|
| UAV Instruction Manual | V1.0.0 | Wang Jiale | 2025.01.10 |
# Deployment
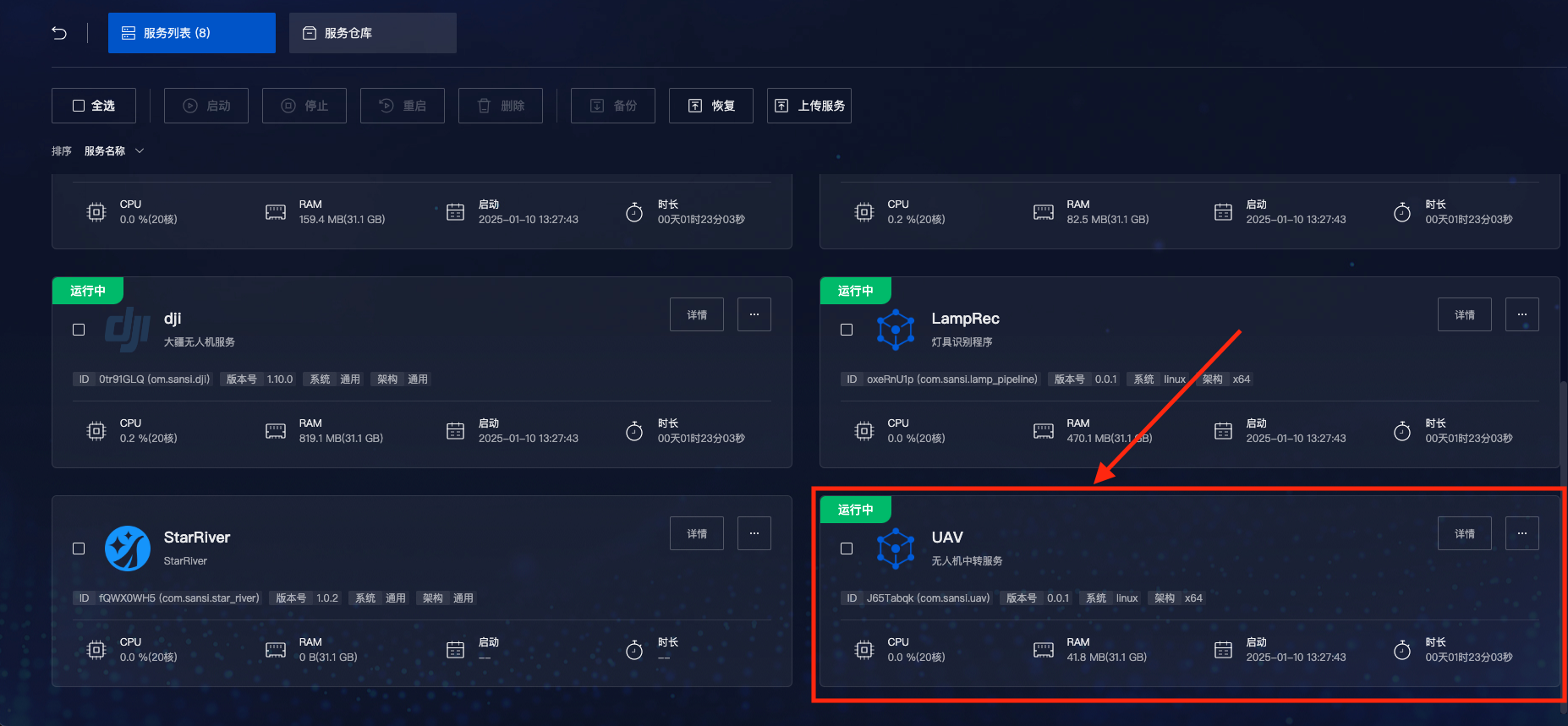
# Server-side Plugin Installation
Xuandao Smart Control => Server List => UAV Plugin => Click to Install
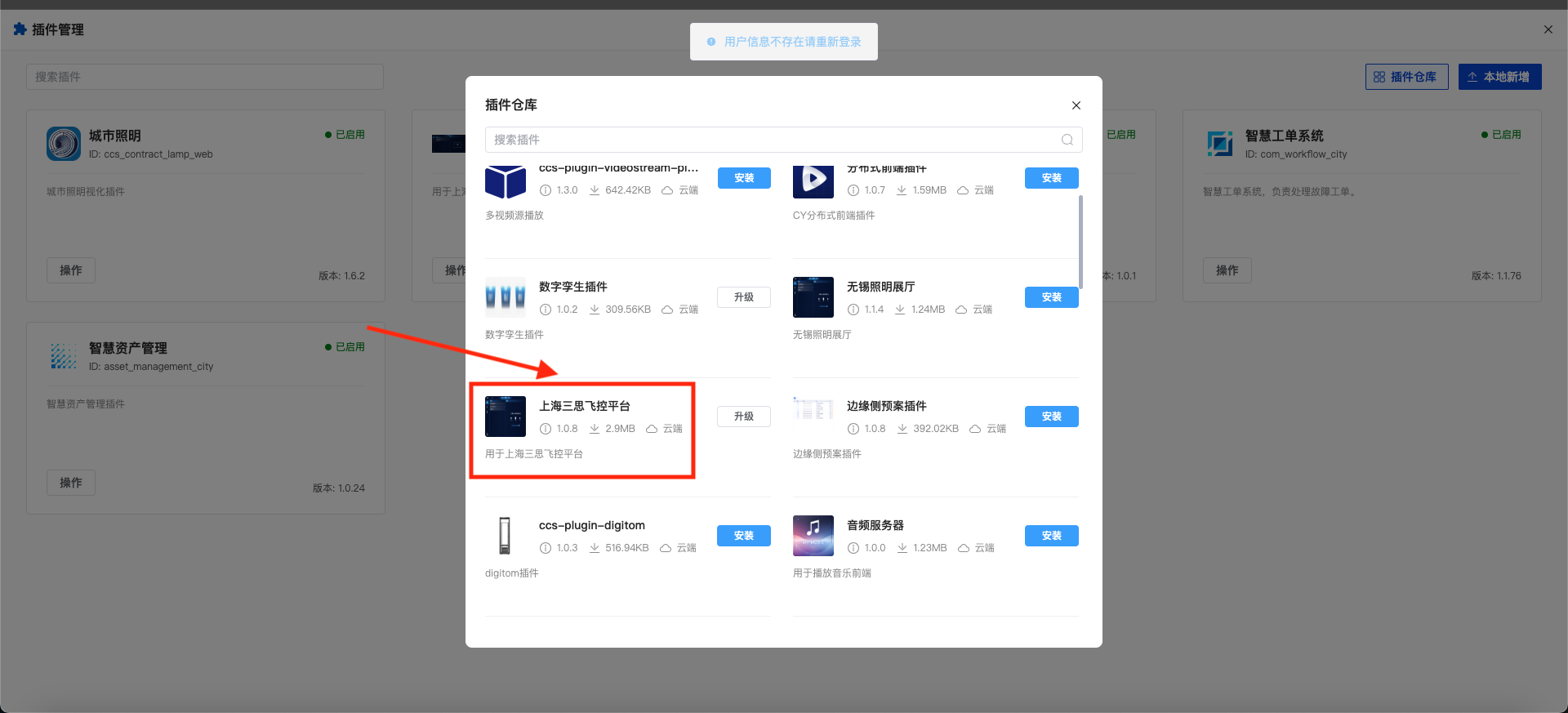
# Front-end Plugin Installation
Xuandao Smart Control => Project => Plugins => Plugin Repository => Shanghai Sansi Flight Platform => Click to Install
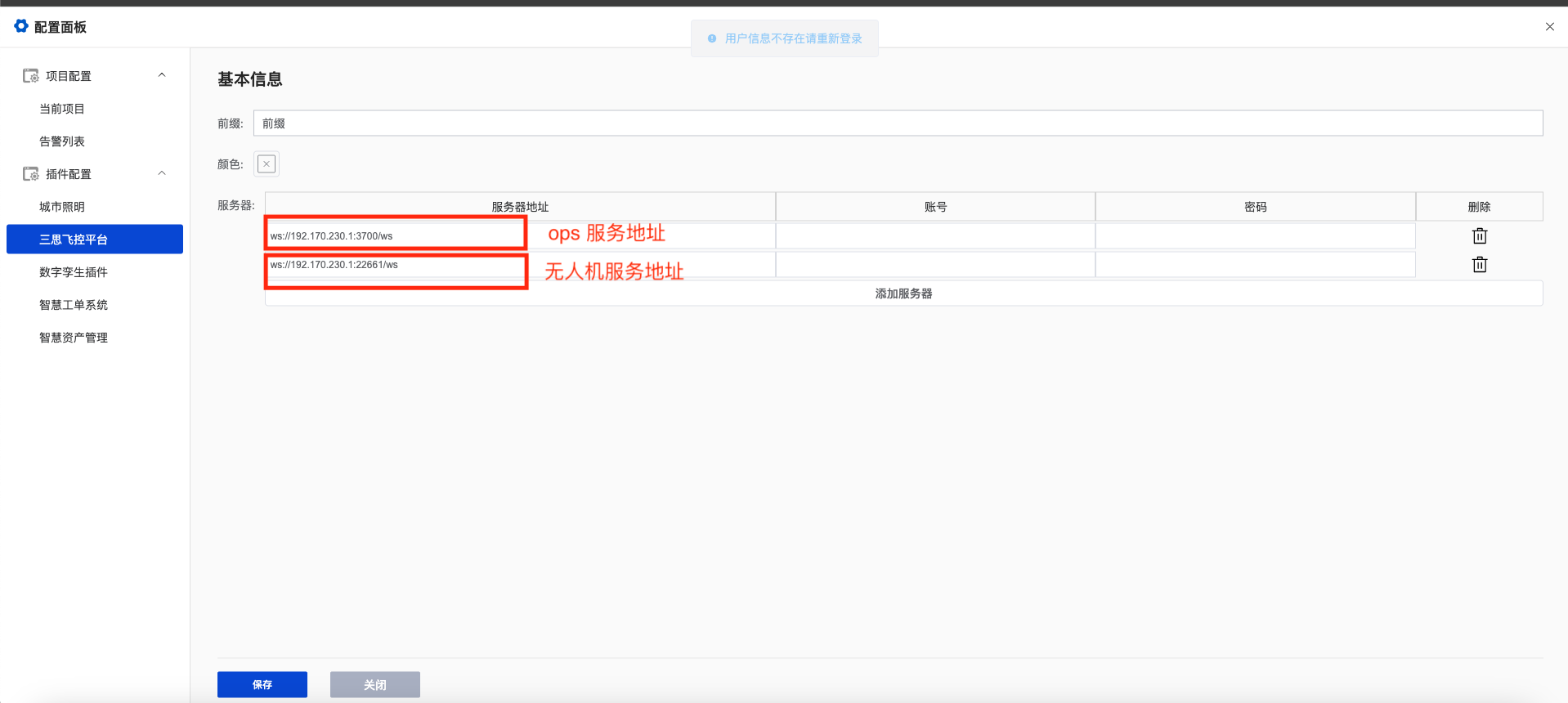
Configure the plugin interface address: Configuration => Plugin Configuration => Shanghai Sansi Flight Platform => Modify the corresponding interface address
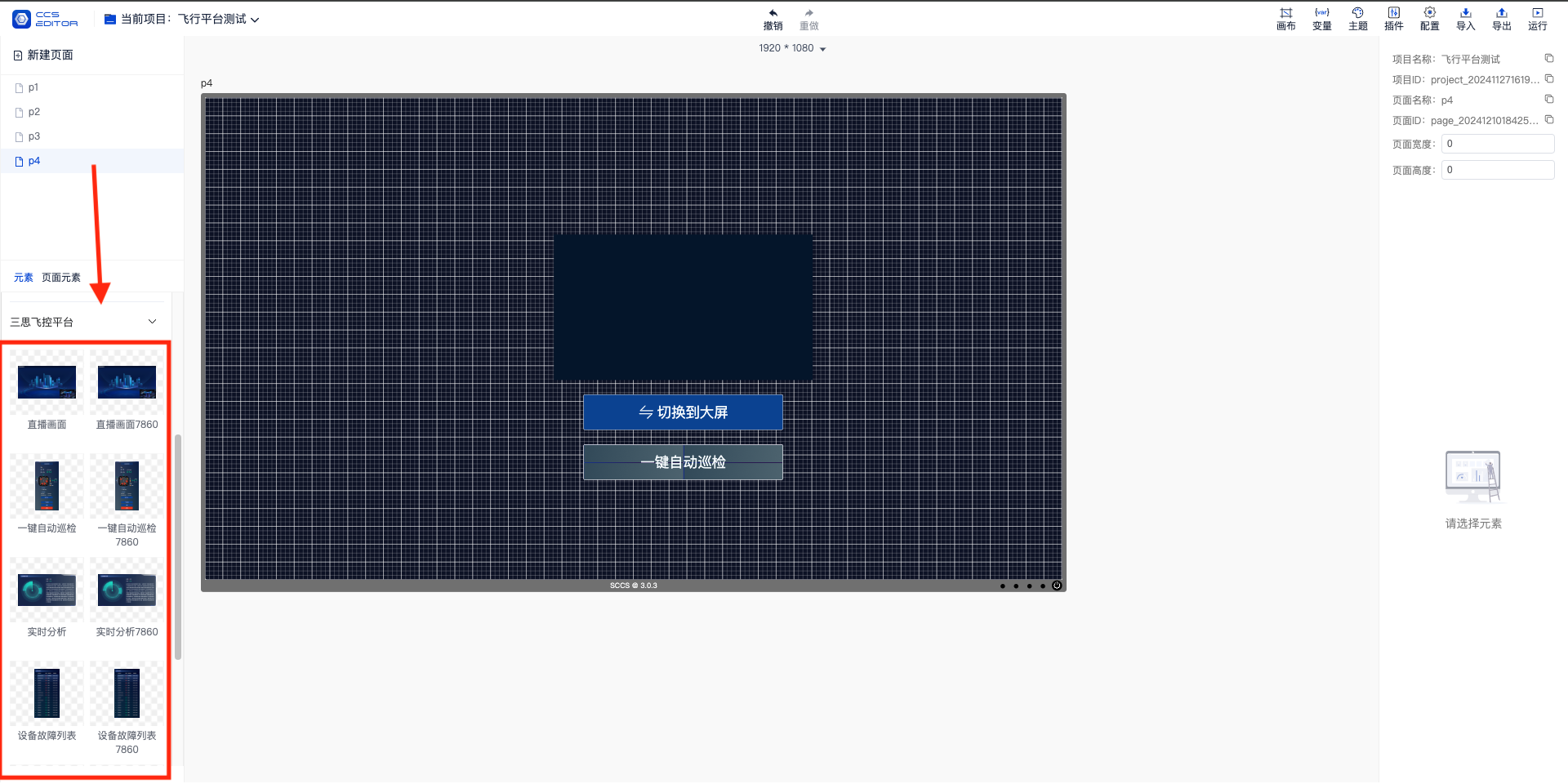
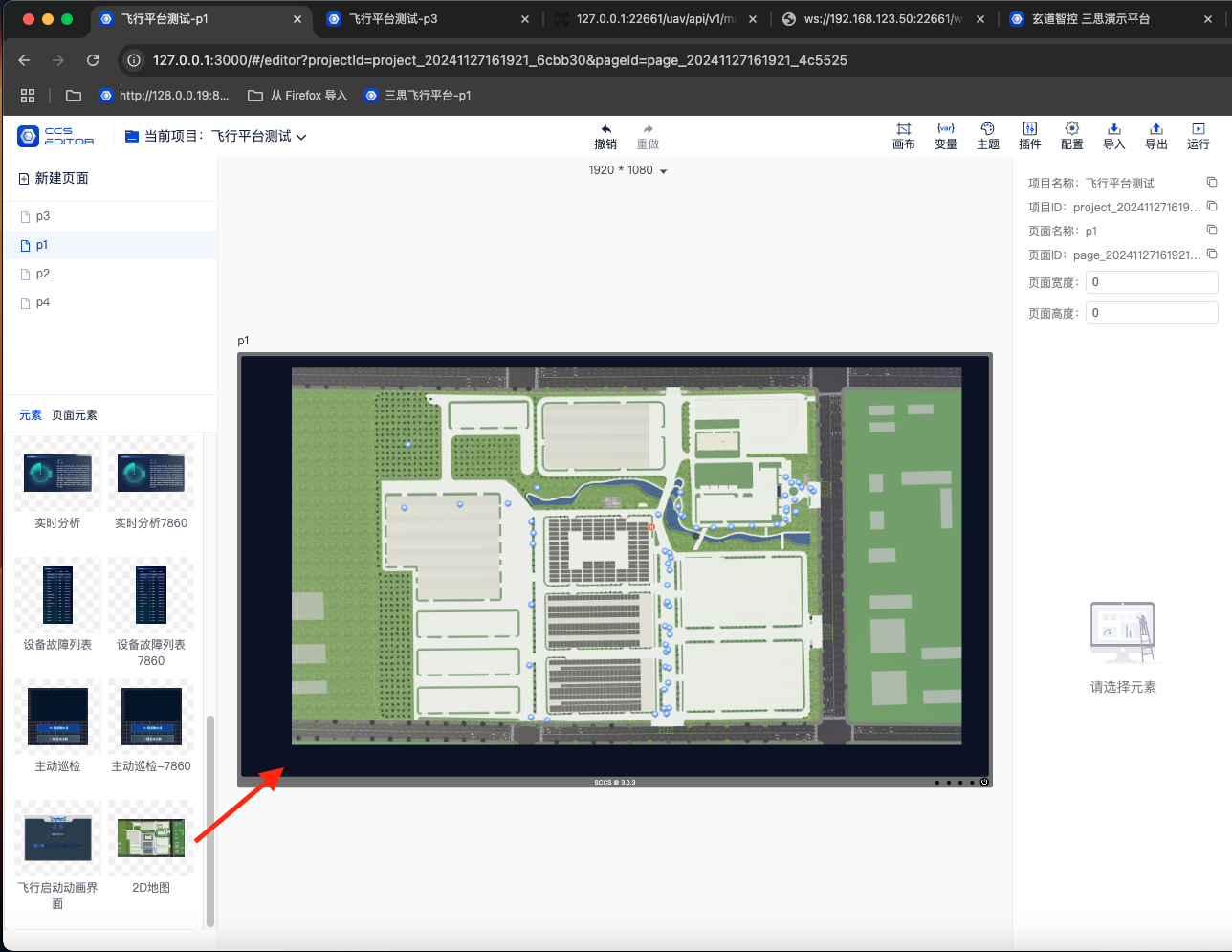
# Usage Instructions
- Open the project.
- Locate the component bar.
- Drag the components into the project.
# Component Descriptions
Real-time Fault Analysis Component
- Detect whether the UAV is in flight.
- Display the device status and information (showing faults, normal operation, warnings, etc.) at each point during the flight.
- Show the task progress of the current task at each point.
UAV Control Component (One-click Takeoff)
- Take off with one click and fly along the selected route.
- Return to the designated airport with one click.
- Pause and resume the flight during the journey.

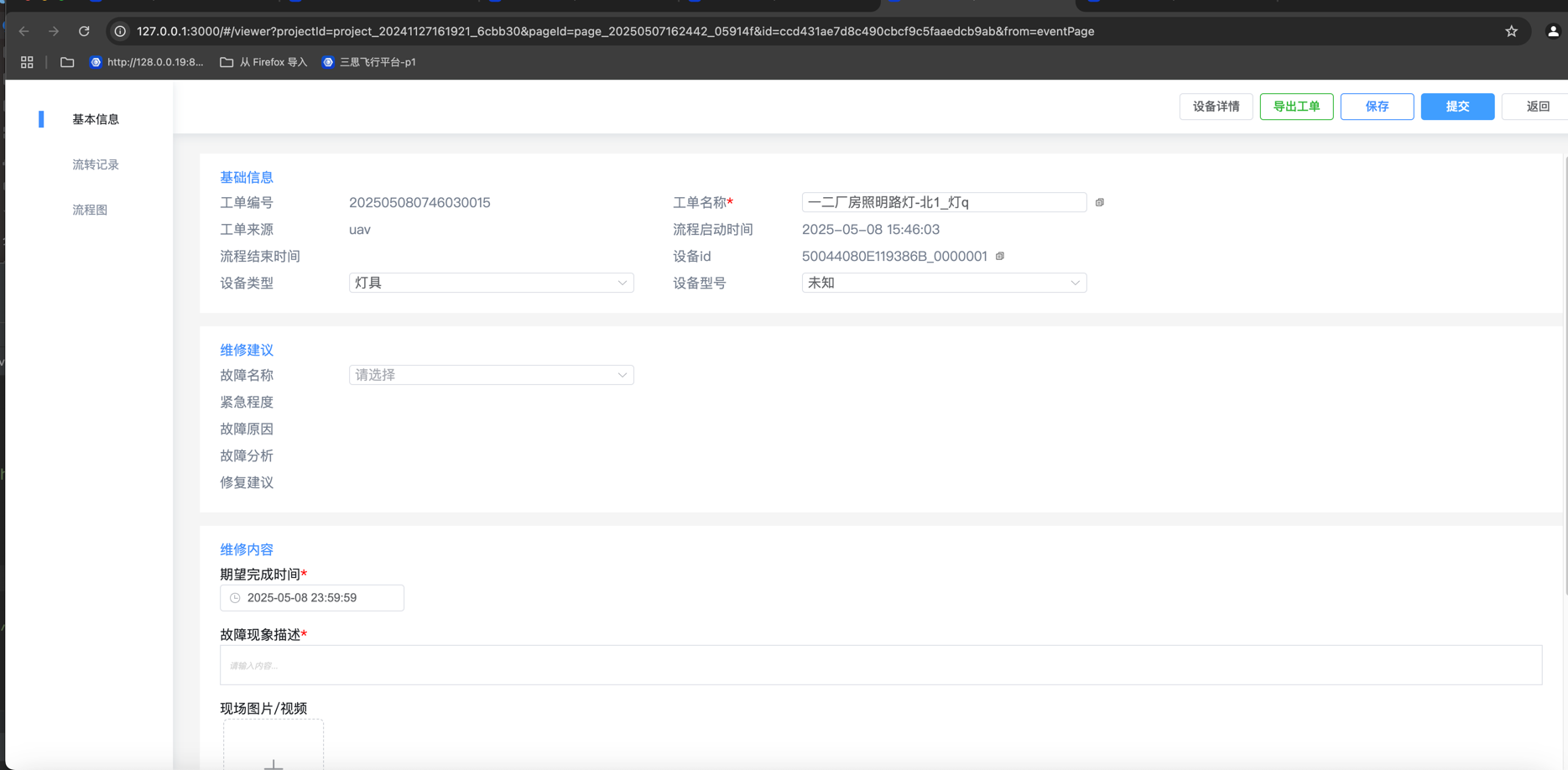
Fault Detection Result List Component
- Display the detection results of each device at points along the route.

- Click the "Create Work Order" button to report faulty devices for processing.

- Click the "View Work Order" button to jump to the work order details page for reported faulty devices.
- Display the detection results of each device at points along the route.
UAV Live Broadcast Component
- Display the real-time flight footage of the UAV.
- Show the footage from the airport camera in a small window.

One-click Automatic Inspection Live Broadcast Interface of UAV
- One-click automatic inspection is a function that executes flight tasks along the default route.
- Switch to full - screen to enlarge the flight footage.
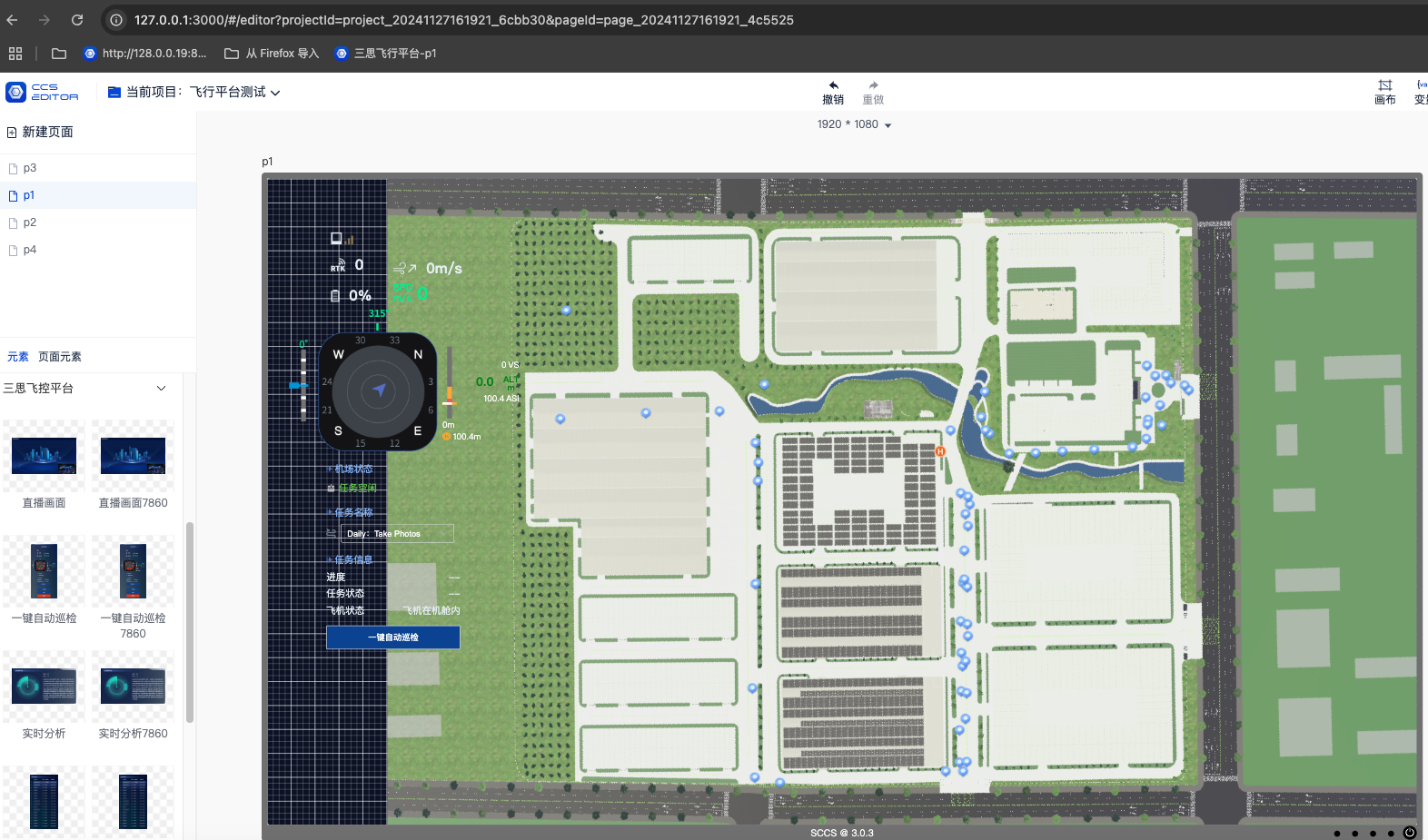
UAV 2D Map Component
- Drag the 2D map onto the page.
- Configure the longitude and latitude of three points required for the map affine transformation algorithm and the corresponding x and y coordinates on the base map.
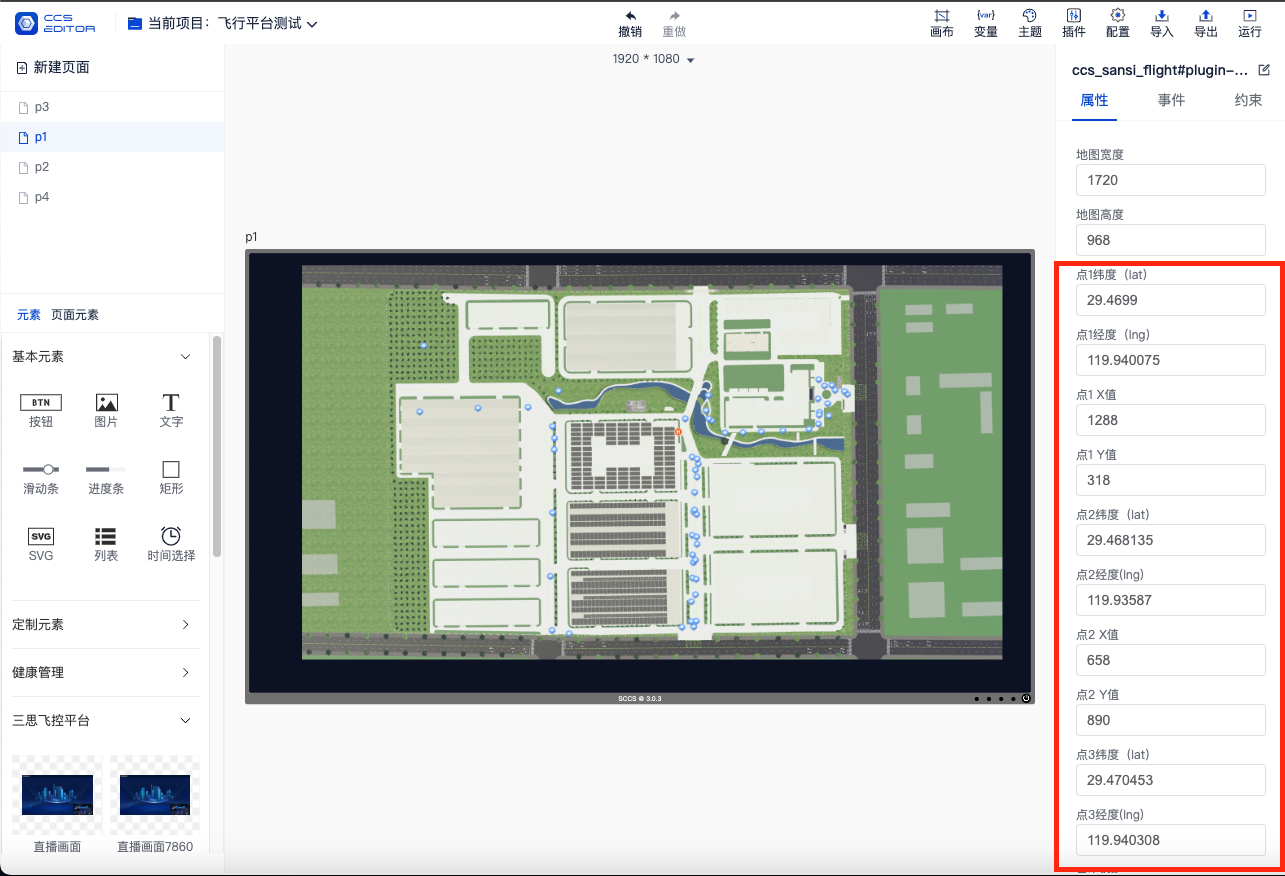
- The default map is the Sansi Pujiang Park map. Replace the 2D background map according to actual needs.
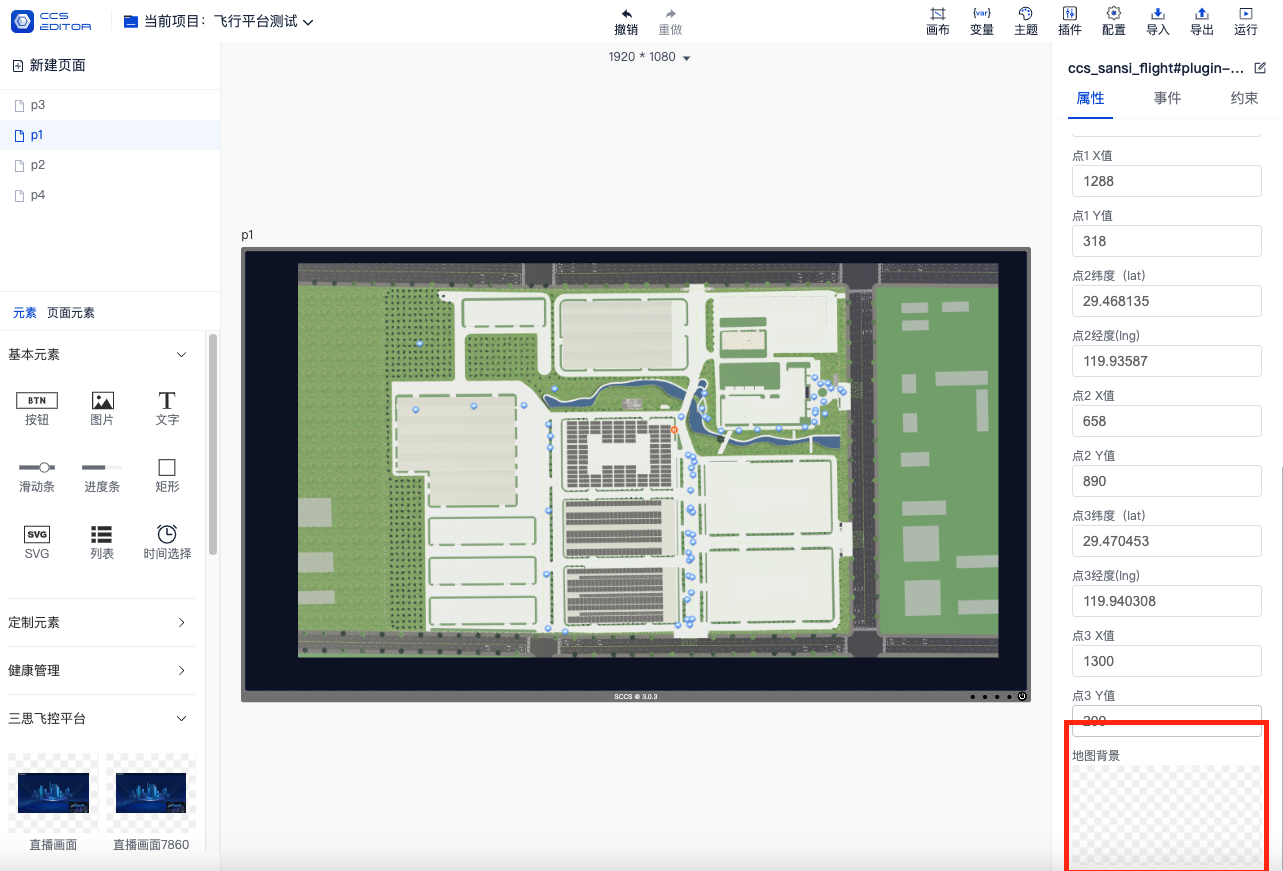
- Configure the original width and height of the base map to calculate the zoomed map.
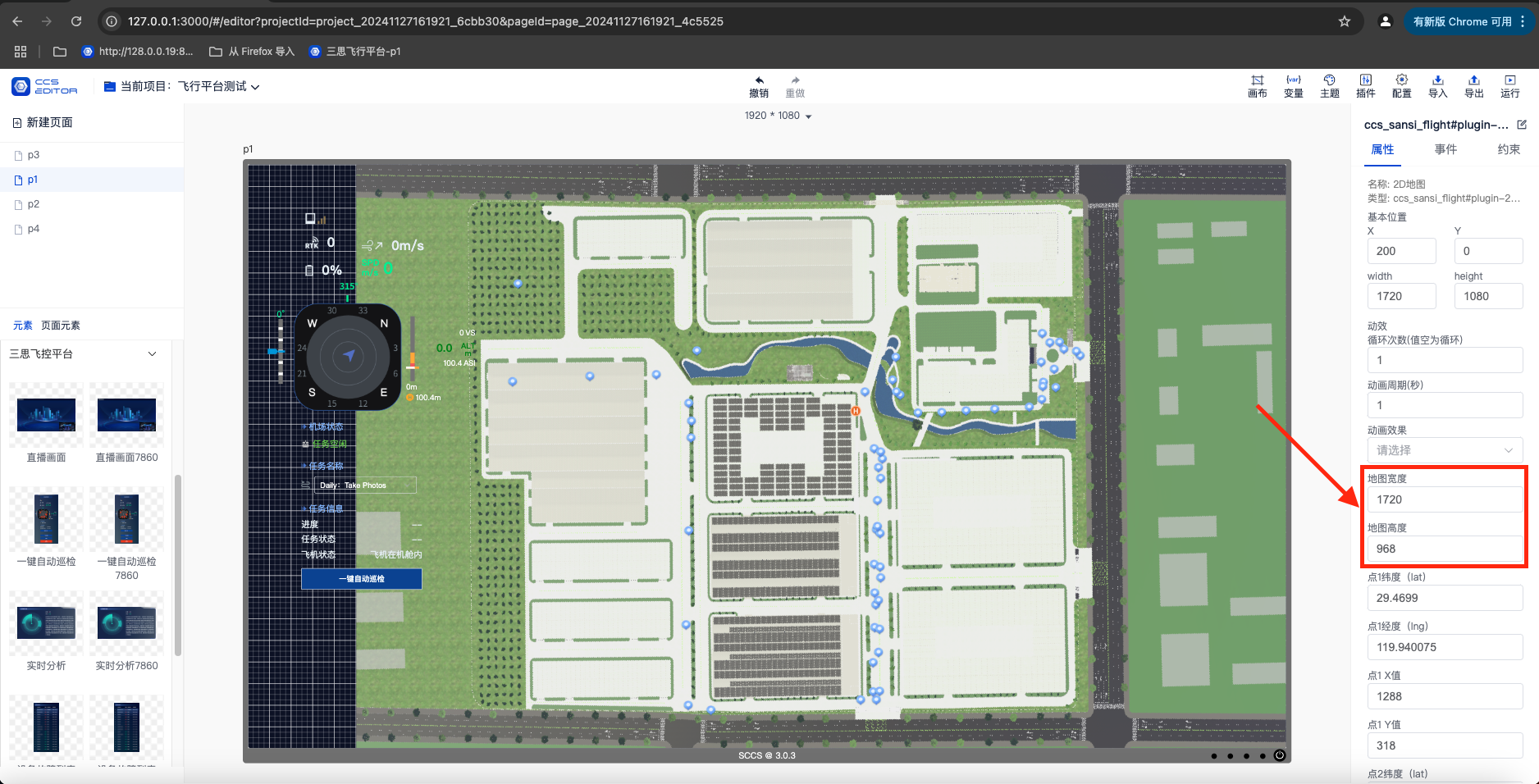
- Render the route points.
- Pan-tilt Component
- Drag the component onto the page and configure the initial position of the pan - tilt.
- The pan - tilt displays the latest captured image of the current route detection point.
- Use the previous and next page functions to browse images.
- Click the images displayed on the pan - tilt to view them in full size.


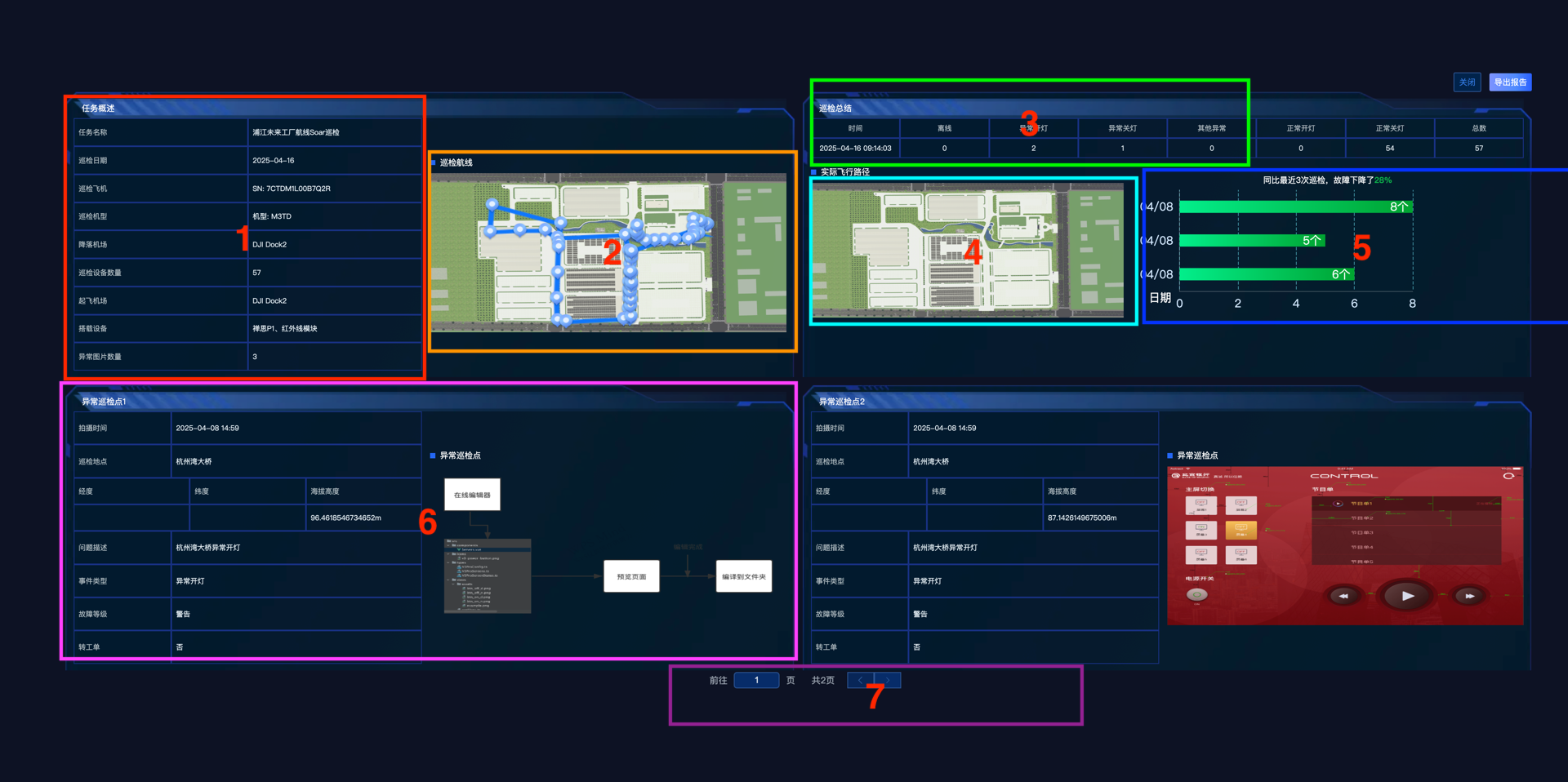
- Inspection Report Component
- Display the inspection report.
- Click the "Export" button to export the inspection report.
- Feature 1 shows an overview of a route task.
- Feature 2 shows the point information of the route task.
- Feature 3 shows the analysis summary of a route task.
- Feature 4 shows the actual flight path of the aircraft during this analysis task.
- Feature 5 shows a comparison chart of the fault data detected during the flight of the aircraft in this analysis task and the latest three flight data.
- Feature 6 shows the detailed information of the faulty device and the captured device images.
- Feature 7 uses the pagination function to display all faulty device information.
# Notes
- Some components with the suffix 7680 are for 7680 resolution, and other components are for resolutions below 3840.
- The UAV startup animation is automatically adapted to 7680 and 3840 resolutions.